


Los sistemas de seguimiento de flotas son razonablemente comunes en el panorama actual de la industria. Conocer la localización y evolución de vehículos en activo suele resultar crítico—disponer de información precisa en tiempo real supone una diferencia notable a la hora de tomar decisiones operativas. Cuando estos sistemas se aplican a vehículos normalmente se suelen centrar en la localización geográfica, lo cual deja una parte significativa del problema sin resolver.
La mayoría de los vehículos dispone de un bus interno de comunicaciones basado en el protocolo CAN. Este protocolo se utiliza para transmitir diversas unidades de información del estado actual del vehículo, como por ejemplo la velocidad actual, avisos de emergencia o los niveles de aceite. Aunque varios fabricantes utilizan sus formatos propietarios de mensaje, existen algunos estándares por encima del protocolo CAN que intentan definir esta información. Una de estas especificaciones es J1939, que se encuentra dentro de los más relevantes en el contexto de vehículos pesados.
La conectividad es otra problemática notable a la hora de resolver el problema del control de flotas. Dadas las características de movilidad propias de los vehículos se tienen que descartar tecnologías que deban estar atadas a un punto de acceso local. Aunque hay alternativas viables como Sigfox, ninguna supera en madurez y nivel de soporte a las tecnologías 3G/4G. La desventaja principal de las redes móviles es la necesidad de establecer contratos particulares con distintos operadores en cada uno de los países en los que se quiere dar servicio. Esto, que puede parecer algo sencillo en un principio, puede derivar hasta convertirse en un quebradero de cabeza de gestión y un cuello de botella.
Recientemente han aparecido productos en el mercado que vienen precisamente para resolver esta problemática. Se trata de servicios de conectividad internacional que encapsulan los detalles de bajo nivel de conectividad en cada país (Hologram.io o Particle.io son ejemplos relevantes). Estos operadores normalmente ofrecen SIMs internacionales que se gestionan de manera unificada independientemente de su localización a través de su panel de control. Se pueden dar de alta SIMs, establecer límites o pausar temporalmente las conexiones sin necesidad de contactar con los operadores concretos.
En CTIC Centro Tecnológico nos hemos basado en estas dos tecnologías (J1939 y servicios de conectividad global) para desarrollar una solución de monitorización de flotas internacional. Cada vehículo pre-procesa, filtra y envía la información relevante extraída del bus CAN, que posteriormente se analiza y visualiza en la nube.
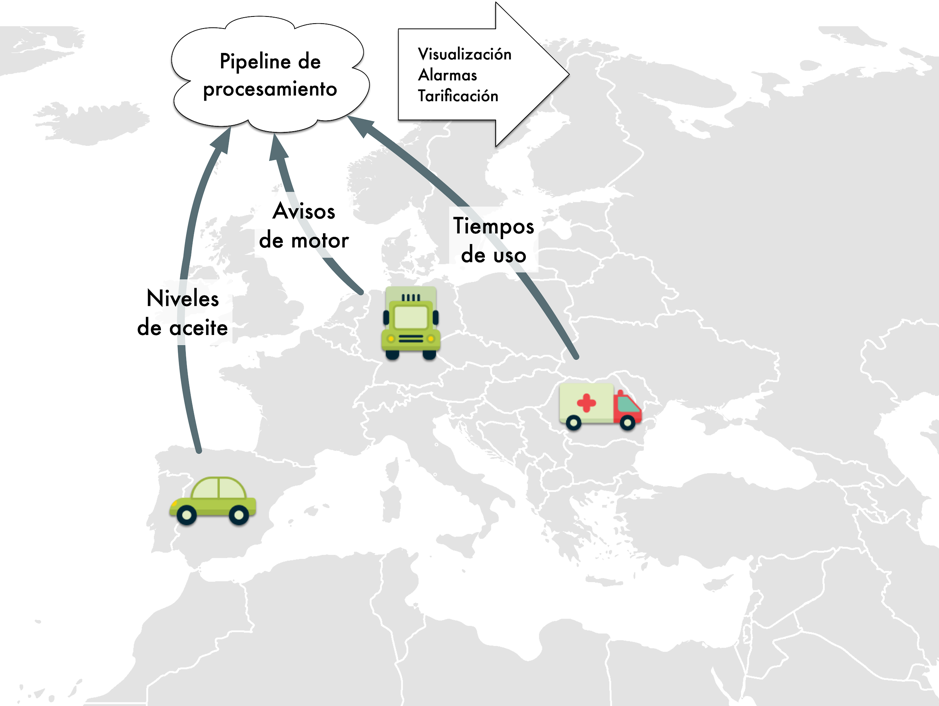
El sistema está compuesto por dos bloques principales. Por un lado, todos los vehículos disponen de un gateway de procesamiento conectado al bus CAN y alimentado a través de la batería. Sobre este gateway se despliega el servicio de captura, que aporta inteligencia a la hora de optimizar la transferencia de información. Una aproximación por fuerza bruta (es decir, transmisión de todas las tramas capturadas) resultaría rápidamente en una factura de datos insostenible y unos costes superiores en la nube debido a los recursos necesarios para procesar los datos en bruto. Para evitar esto, el servicio de captura filtra las tramas y las clasifica en función de su prioridad, transmitiendo únicamente las que se estiman necesarias debido a su importancia, o a la antigüedad de los datos previamente transmitidos. La configuración del gateway pone además el foco en respetar el consumo de la batería, durmiendo siempre que es posible y encendiéndose únicamente cuando el vehículo está en activo. Resulta interesante destacar que el servicio de conectividad global también proporciona la localización geográfica aproximada, lo que nos permite añadir esa funcionalidad con mínimo coste.
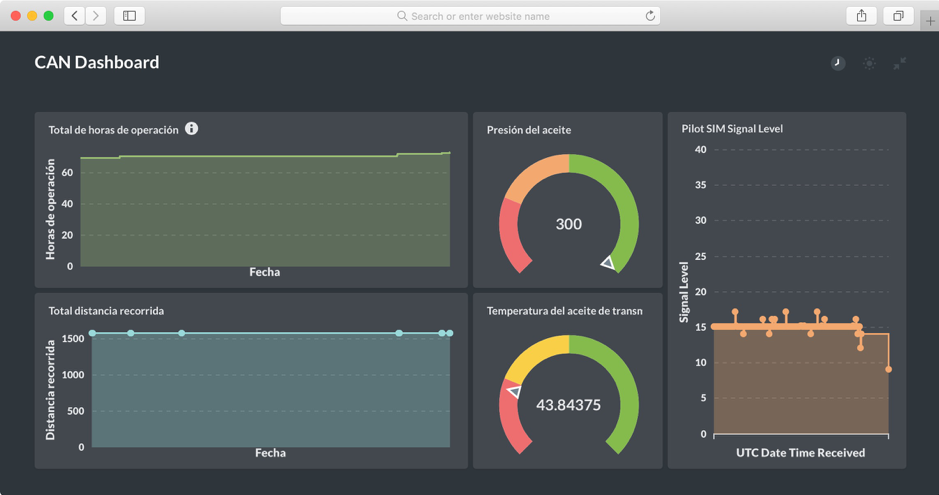
En el otro extremo se encuentra la plataforma central de análisis. Todos los datos que llegan a la plataforma pasan por un pipeline de procesamiento que, entre otras cosas, traduce y clasifica los mensajes CAN para almacenarlos posteriormente en los dos formatos (original y procesado). La traducción de mensajes es algo particular del protocolo J1939 y es necesaria para que los valores tengan sentido para el usuario. Una vez pasada esta fase, los datos pueden visualizarse en un dashboard implementado sobre Metabase. Este es un framework para construcción de aplicaciones de visualización que proporciona herramientas con diversos niveles de abstracción, desde la construcción de consultas a bajo nivel, hasta el análisis e inferencia automática de las métricas y gráficas de interés del conjunto de datos.
Creemos que los beneficios de un sistema de estas características son claros desde el primer momento. Los operadores de flotas pueden ser conscientes de la fotografía del estado de sus vehículos; monitorizar los avisos del motor para adelantarse a las averías; revisar los históricos de evolución para la resolución de incidentes; o, en general, tener visibilidad de situaciones en las que previamente no había posibilidad de tener información veraz.
Andrés García Mangas
